So Quasi als Einstand möchte ich Euch nun mein Fahrregler vorstellen. Bei dessen Entwicklung war mir wichtig, dass er bei möglichst kleinem Bauteileaufwand universell einsetzbar ist und ein Maximum an Robustheit und Komfort bietet. Nach verschiedenen Versuchen (und Irrtümern) bin ich schliesslich auf die hier vorgestellte Pulsfrequenzsteuerung gekommen, die ich dann als Printplatte gelayoutet und bei einer Firma bei mir im Dorf herstellen liess. Um die universelle Einsetzbarkeit unter Beweis zu stellen, habe ich einerseits ein Superfahrpult darum herum gebaut, während auf der Anlage insgesamt 17 Stück, grösstenteils automatisch, d.h. per Relaiskontakt gesteuert werden. Somit hat bei mir jeder Block sein eigener Fahrregler. Als ich dann eine Spur 0 – Anlage elektrifizieren durfte habe ich den Regler noch weiter entwickelt, davon jedoch später…

Nun zur Funktionsbeschreibung:
Es macht vermutlich nicht viel Sinn, bis ins letzte Detail zu gehen und ich versuche, einfach mal das Wesentliche zu beschreiben. Falls jemand näheres wünscht, kann ich dies gerne noch nachliefern.
Über Potentiometer P1 und P2 wird C1 befüllt und entleert. Dessen Spannung steuert proportional die effektive Ausgangsspannung. P1 ist also quasi der „Gashahn“, P2 der Verzögerungsregler und die Verzögerungswerte ergeben sich aus den Werten von P2 und C1.
R2, P3 und C2 bestimmen dabei die Impulsdauer und kann mit P3 eingestellt werden. Die Impulspausen werden über T1 gestellt und zwar mit null Volt im C1 auf unendlich und mit Voller Spannung im C1 mit sehr kurzen Impulspausen. Als Herzstück des Pulsgenerators ist ein Timer- IC NE 555, an dessen Ausgang dann eine Rechteckspannung anliegt, welche dann per R-C Gruppe P4+C3 in eine für Modellbahnmotoren bekömmlichere, da sinusförmigere, pulsierende Spannung gewandelt wird. Anschliessend wird das Signal per Darlingtonschaltung verstärkt.
Hier ein Bild der Wellenform:

Zum Betrieb des Fahrreglers würde ich ein Schaltnetzteil empfehlen, da mit einer stabilen Versorgungsspannung die besseren Langsamfahreigenschaften resultieren. Auf meiner Anlage habe ich ein solches mit 15 Volt und 5 Ampere für 15 Blöcke und es funktioniert hervorragend!
Folgende Bauteilwerte würde ich empfehlen:
P1 10 kΩ
P2 47 kΩ
C1 ab 100 μF abhängig von der gewünschten Verzögerung
R1 100 kΩ
T1 BC 108 oder ähnlich
D1 + D2 1N 4148 genügt
C2 0.1 – 1 μF – bestimmt mit P3 die Pulsbreite resp. Frequenz
R2 470 Ω
P3 10 kΩ Pulsbreite
IC1 Ne 555
P4 5 kΩ
C3 0.2 - .68 μF
R3 10 kΩ
T4 BC 108
T5 BD 139 oder BD 433 oder ähnlich
Als F1, eine Sicherung habe ich eine sog. Polyfuse 1.5 A eingesetzt – reicht völlig.
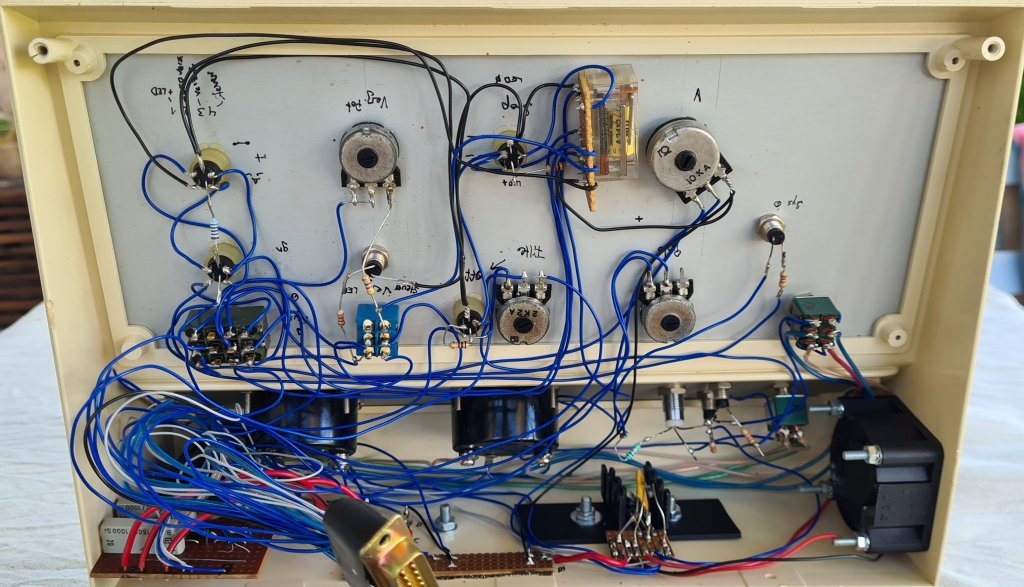
Und hier ein Bild meines Superfahrpults:

Nun wünsche ich viel Spass beim Nachbau!
Rolf
Nun zur Funktionsbeschreibung:
Es macht vermutlich nicht viel Sinn, bis ins letzte Detail zu gehen und ich versuche, einfach mal das Wesentliche zu beschreiben. Falls jemand näheres wünscht, kann ich dies gerne noch nachliefern.
Über Potentiometer P1 und P2 wird C1 befüllt und entleert. Dessen Spannung steuert proportional die effektive Ausgangsspannung. P1 ist also quasi der „Gashahn“, P2 der Verzögerungsregler und die Verzögerungswerte ergeben sich aus den Werten von P2 und C1.
R2, P3 und C2 bestimmen dabei die Impulsdauer und kann mit P3 eingestellt werden. Die Impulspausen werden über T1 gestellt und zwar mit null Volt im C1 auf unendlich und mit Voller Spannung im C1 mit sehr kurzen Impulspausen. Als Herzstück des Pulsgenerators ist ein Timer- IC NE 555, an dessen Ausgang dann eine Rechteckspannung anliegt, welche dann per R-C Gruppe P4+C3 in eine für Modellbahnmotoren bekömmlichere, da sinusförmigere, pulsierende Spannung gewandelt wird. Anschliessend wird das Signal per Darlingtonschaltung verstärkt.
Hier ein Bild der Wellenform:
Zum Betrieb des Fahrreglers würde ich ein Schaltnetzteil empfehlen, da mit einer stabilen Versorgungsspannung die besseren Langsamfahreigenschaften resultieren. Auf meiner Anlage habe ich ein solches mit 15 Volt und 5 Ampere für 15 Blöcke und es funktioniert hervorragend!
Folgende Bauteilwerte würde ich empfehlen:
P1 10 kΩ
P2 47 kΩ
C1 ab 100 μF abhängig von der gewünschten Verzögerung
R1 100 kΩ
T1 BC 108 oder ähnlich
D1 + D2 1N 4148 genügt
C2 0.1 – 1 μF – bestimmt mit P3 die Pulsbreite resp. Frequenz
R2 470 Ω
P3 10 kΩ Pulsbreite
IC1 Ne 555
P4 5 kΩ
C3 0.2 - .68 μF
R3 10 kΩ
T4 BC 108
T5 BD 139 oder BD 433 oder ähnlich
Als F1, eine Sicherung habe ich eine sog. Polyfuse 1.5 A eingesetzt – reicht völlig.
Und hier ein Bild meines Superfahrpults:
Nun wünsche ich viel Spass beim Nachbau!
Rolf